Economy & Tech
Could Autonomous Robots Build a Base on the Moon?
Autonomous robots could play a crucial role in constructing a lunar base, which would be indispensable for sustaining human activity.
A team of researchers, including members of the Japan Aerospace Exploration Agency (JAXA), demonstrated for the first time how small robots could be used to construct a lunar base. During the demonstration, the autonomous robots worked together with remarkable accuracy.
The global competition to expand human activities beyond Earth has now entered a new phase: focusing on what happens after landing.
Sustained Human Activity
JAXA is a partner agency of the ambitious Artemis program, led by NASA. The program aims to return astronauts to the lunar surface in 2025, marking the first manned moon landing in half a century.
However, the program's vision extends beyond this milestone. It envisions a lunar base that would make sustained human activity possible. This facility would have various uses, including resource extraction and acting as a relay point for Martian exploration.
The base would also safeguard human well-being and ensure proper material storage in the challenging lunar environment, where intense cosmic radiation poses risks to both humans and supplies.

Construction on the Moon
However, large construction machinery used on Earth would be impractical on the Moon due to transportation and maintenance difficulties.
To address this complex challenge, a Japanese research team comprising approximately 20 organizations, including JAXA and the University of Tokyo, opted for a different approach.
The team turned to small robots for innovative and efficient civil engineering on the Moon. These robots can collaborate autonomously, leveraging AI technology to reduce the need for constant human intervention.
Japan's 'Moonshot' Program
The demonstration was part of Japan's Moonshot Research and Development Program, initiated in 2019. It aims to create a prototype of the system by 2025 and achieve practical implementation by 2050. The presentation at JAXA Sagamihara Campus in Sagamihara served as the project's status report.
The demonstration took place at the Space Exploration Field within the Advanced Facility for Space Exploration on the Sagamihara campus. To replicate the lunar surface, the area was covered with sand to look like dunes.
The primary aim of the demonstration was to show how the robots could prepare the lunar surface. These robots measure about 1 square meter (11 square feet) and weigh 50 kilograms (110 pounds). This makes them easy to transport on exploration vehicles.


Soil Investigation Robot
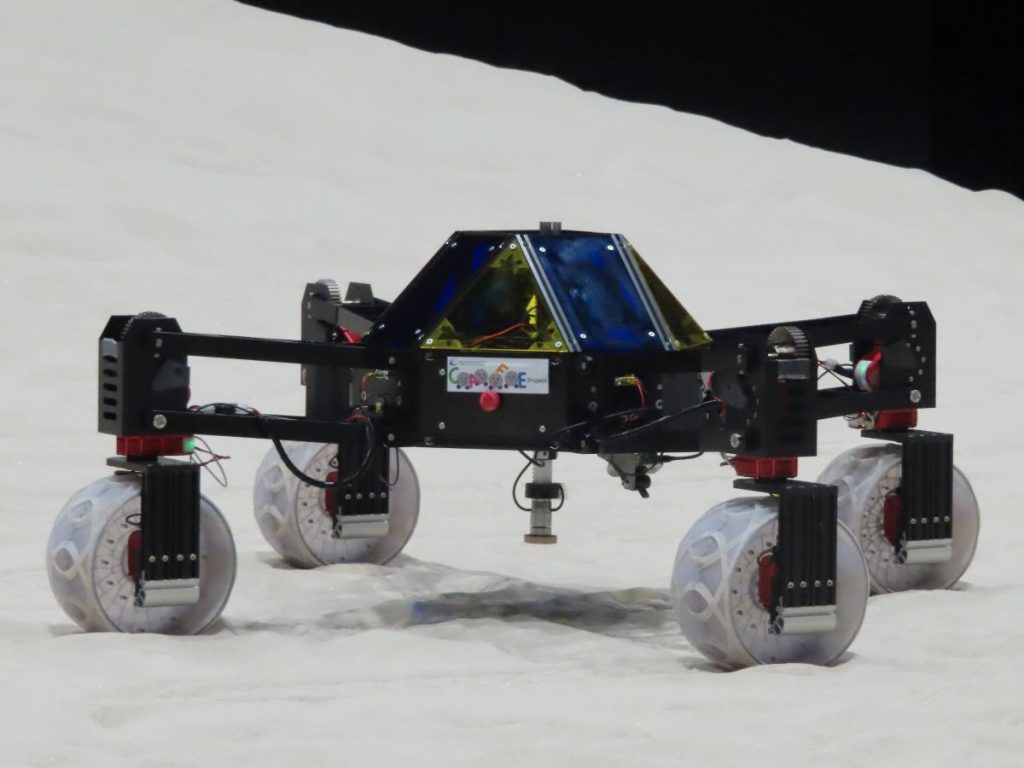
After landing on the Moon, the first task would be to assess the environment for constructing a base. During the demonstration, Keio University's automatic soil investigation robot played a vital role. The compact four-wheeled robot explored the area surrounding the landing site, collecting data by running a measuring device along the lunar surface at regular intervals.
As it collected data on surface hardness and other geological characteristics, it created a mesh-like pattern on the sand. On the moon, this robot would help identify the most suitable location for base construction.

Preparing the Lunar Surface
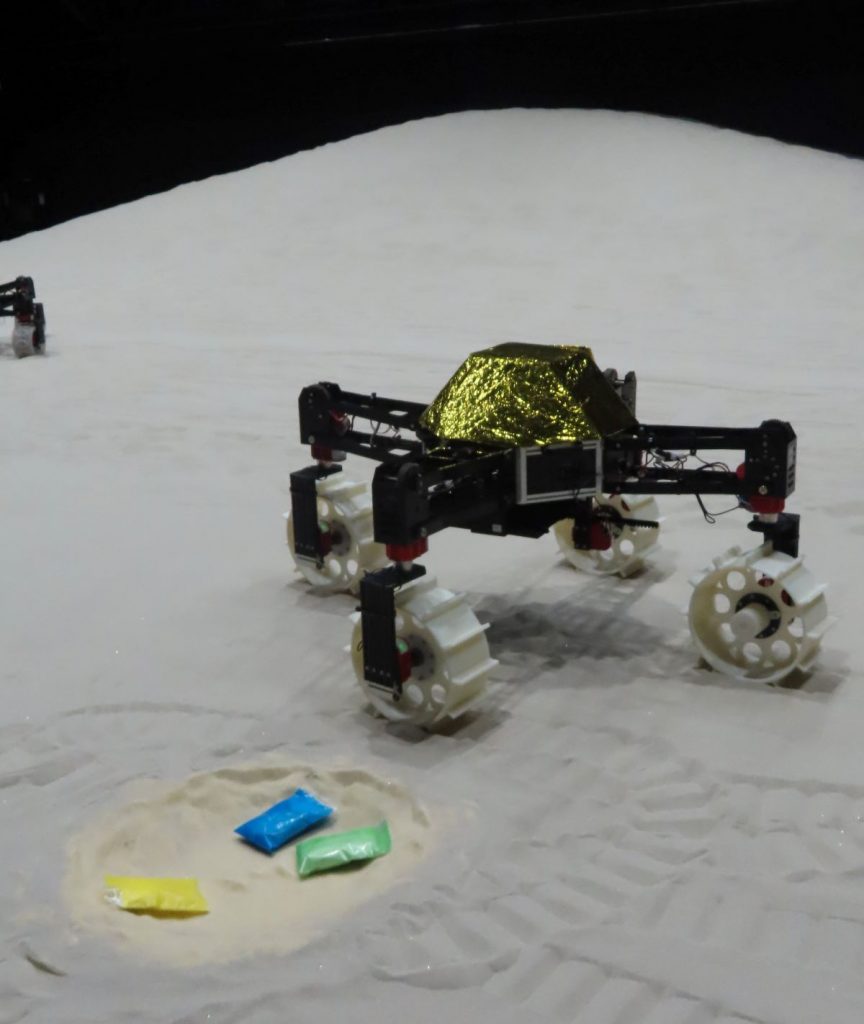
Furthermore, craters on the moon could impede the construction process. During the experiment, a robot with a similar design to the soil investigation robot placed small sacks into a hole it had detected. This robot would be responsible for using sandbags to fill in the craters.
After that, another robot, this time with four wheels, pressed and hardened the ground like a road roller. A robot resembling a bulldozer also helped smoothen the surface.

The Inchworm Method
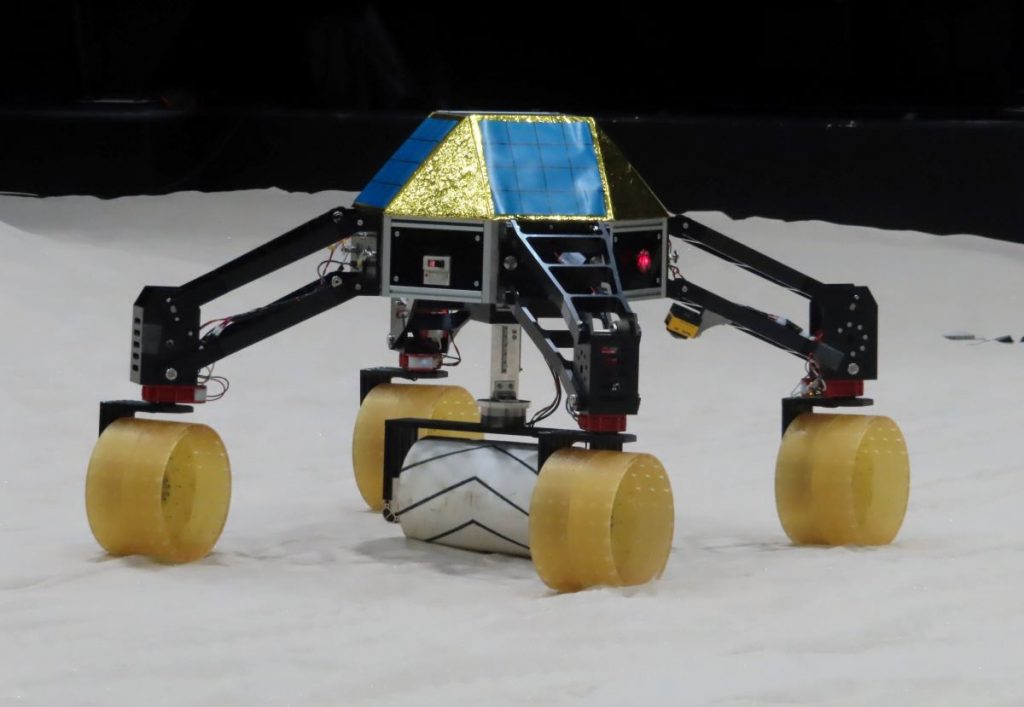
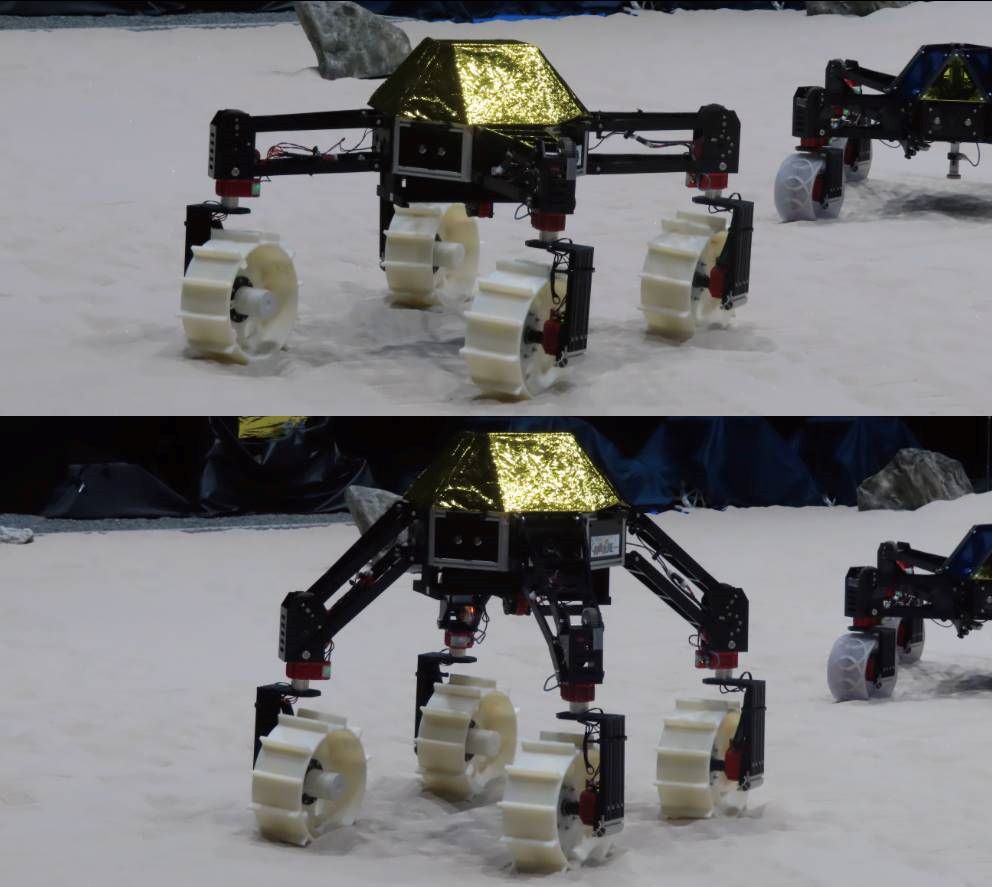
Robots may also encounter malfunctions or obstacles that hinder their movement. To address this concern, the four-wheeled robot developed by Kyushu Institute of Technology has a special maneuver to free itself when stuck.
During the demonstration, one of the robot's four wheels got stuck. But the robot's four legs, which support the wheels, can move like inchworms. By repeating this action, the robot managed to release itself from the soft ground.

Another robot that took part in the experiment was developed by the Nara Institute of Science and Technology. It can autonomously detect large stones and obstacles in the sand. Using a device resembling a rake, the robot tried to retrieve and place the stones in a dedicated box. After several attempts, the robot successfully completed the task.
"The lunar surface has countless irregularities that we won't fully understand until we actually land," explains Keiji Nagatani, a specially appointed professor at the University of Tokyo and the project's manager.
"But even in such a harsh environment, small robots can work remarkably by collaborating autonomously. Our goal is to push forward with research and development to achieve a level [lunar] surface so that the exploration vehicles can land safely."
RELATED:
- Hayabusa2 Asteroid Samples Offer Clues to the Origins of Life
- EDITORIAL | Japan's Manned Space Exploration Program Needs More Astronaut Recruits
- NASA to PM Fumio Kishida: 'Come Into Space With Us - Mars Awaits!'
- ispace Fails Moon Challenge but Gains Insight for Future Missions
(Read the article in Japanese.)
Author: Juichiro Ito
You must be logged in to post a comment Login