
実証機スリム活動再開 月が「昼」になり発電可能に

~~
宇宙航空研究開発機構(JAXA)は1月29日、世界5カ国目の月面着陸に成功後、太陽電池に太陽光が当たらず活動を停止していた日本の実証機、「スリム(SLIM)」が月面活動を再開したと発表した。
JAXAは25日、スリムが目標地点から約55メートルの位置に着陸したと発表。目標地点への誤差を100メートル以内に抑える高精度な「ピンポイント着陸」に成功したのは世界で初めて。飛行データや月面ロボットの撮影画像から判明した。ただ、降下途中にエンジンが破損し姿勢が乱れ、予定の姿勢から180度回転した形の「倒立状態」で着地したという。
JAXAによると、スリムは20日、月の約15キロ上空から、クレーター周辺の斜面に向けて正立状態で、月面の画像を撮影しながら降下した。事前観測で用意した月面地図と14回にわたり照合し、自分の位置を正確に把握。搭載していた目標地点から約55メートルの場所に着陸することに成功した。
目標地点周辺の障害物を自律的に回避していたことから、JAXAでは最終的に目指した地点への着陸誤差は少なくとも10メートル以内で、わずか3~4メートルだった可能性が高いとみている。
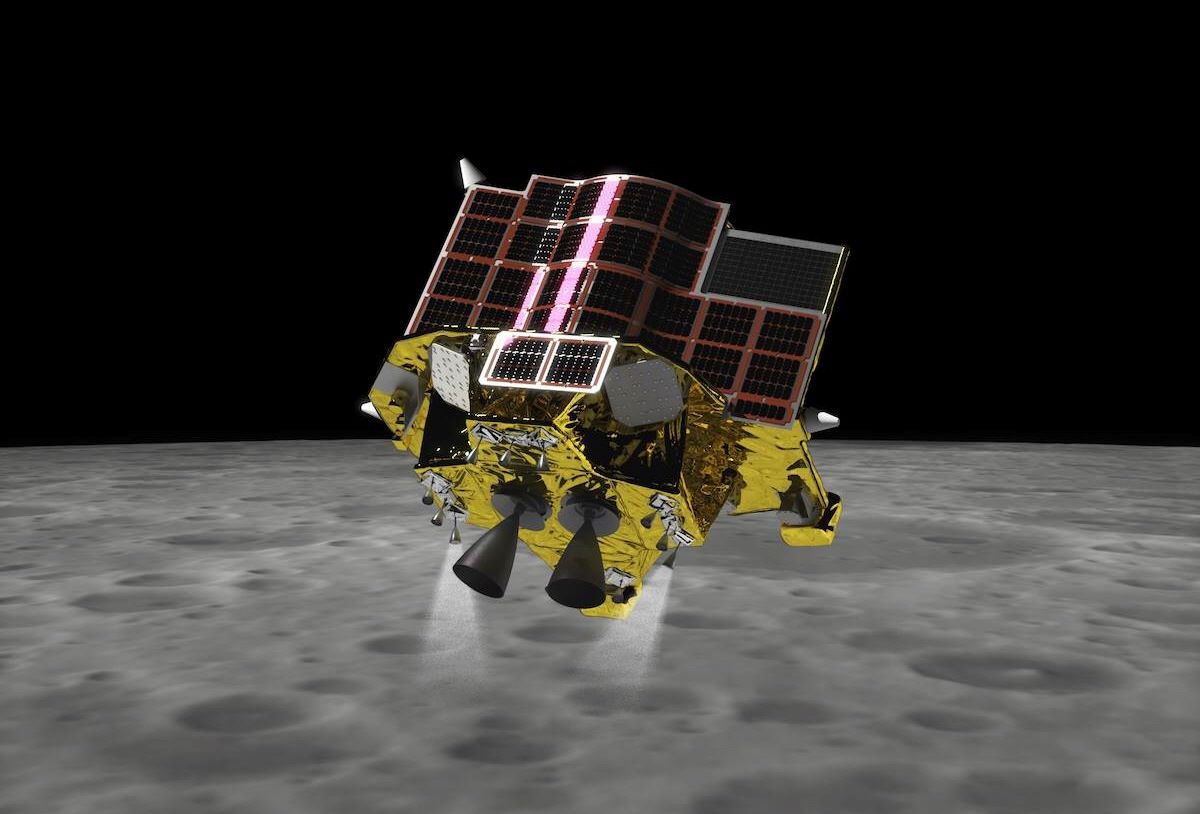
月面に着陸する小型月着陸実証機「スリム」の想像図(JAXA提供)
一方、着陸姿勢は計画と大きく異なった。スリムは着陸直前に、超小型の月面ロボット「ソラキュー(SORA-Q)」と月面探査機「LEV-1」を放出。その後、機体底面の一端で接地してから機体を斜面に倒れ込むように傾け、上部側面も接地し斜面で姿勢を安定させる「2段階着陸」を行う計画だった。
だが、2基のエンジンのうち1基が破損し、逆噴射の出力を失ったことから姿勢を崩したという。着陸姿勢は、飛行データの解析のほか、ソラキューが月面で撮影し、LEV-1が地球に送信した画像から、倒立状態と判明した。太陽電池は太陽光が差し込まない西側を向き、発電できない状態だった。エンジン破損の原因は不明で、着陸時に機体がどのような動きをしたかも含め、解明を急いでいる。
獲得済みの飛行データや月面の画像を、持続時間わずか数時間の内蔵バッテリーで地球に送信した後、太陽電池の発電が可能になった際にシステムを安定的に再起動できる最低限の余力を残し、電源をオフにしていた。

「SORA―Q(ソラキュー)」の変形前(左)と変形後(右)(JAXA/タカラトミー/ソニーグループ(株)/同志社大学提供)
JAXAは29日、スリムが月面活動を再開したと発表。機体周辺が月の「昼」になって太陽光の向きが変わり、発電が始まったとみられる。着陸地点周辺の岩石の撮影も行っているという。
JAXAによると、スリムと地球との通信が28日午後11時に復旧。太陽電池が電力の供給を始めてスリムのシステムが再起動し、月面での活動を再開したことが確認された。送られてきた機体のデータから、観測用の特殊なカメラも稼働可能と分かり、周辺の岩石の撮影を実施。画像は順次、地球に届いている。
月の1日は地球の約27日に当たり、スリムが20日未明に着陸した月の赤道南側の「神酒の海」は「朝」だった。そのため太陽光は東から差し、機体西側で影になる太陽電池に当たらなかった。その後、「昼」になって太陽光の向きが変わり、発電が可能になったとみられる。
ただ、「昼」の月面温度は100度を超えるため、機器の半導体の損傷が予想され、正常な月面活動が可能なのは数日程度とみられる。また、2月に入ると周辺は「夜」となり闇に包まれ、特殊カメラでの撮影が困難になる。JAXAは「機体の状態を見守りながら、可能なかぎり月面活動を続けたい」としている。
You must be logged in to post a comment Login